At the New Jersey Institute of Technology, I have worked alongside Dr. Petras Swissler to engineer cost-effective, mass-producible robots (skitterbots) utilizing vibration motor-based locomotion on a flexible PCB. Throughout this process, I have meticulously iterated through multiple prototypes, refining their structure, design, and weight distribution to optimize performance. Currently, I am exploring a water-based movement system to further enhance versatility. Below, you’ll find a collection of key milestones and images showcasing my designs along this journey.

The inspiration for this project is the KiloBot created by the Harvard School of Engineering and Applied Sciences. Their project demonstrated the potential of low-cost swarm robotics, inspiring us to explore how similar concepts could be applied with a more scalable and efficient design. While the KiloBot relied on a rigid PCB structure, our project pushes the boundaries by leveraging flexible PCBs for more cost-effective manufacturing.
By utilizing similar vibration motor-based locomotion, we aim to further optimize mass production feasibility. This approach not only enables cost-effective development but also paves the way for diverse applications, from environmental sensing to collective behavior studies.
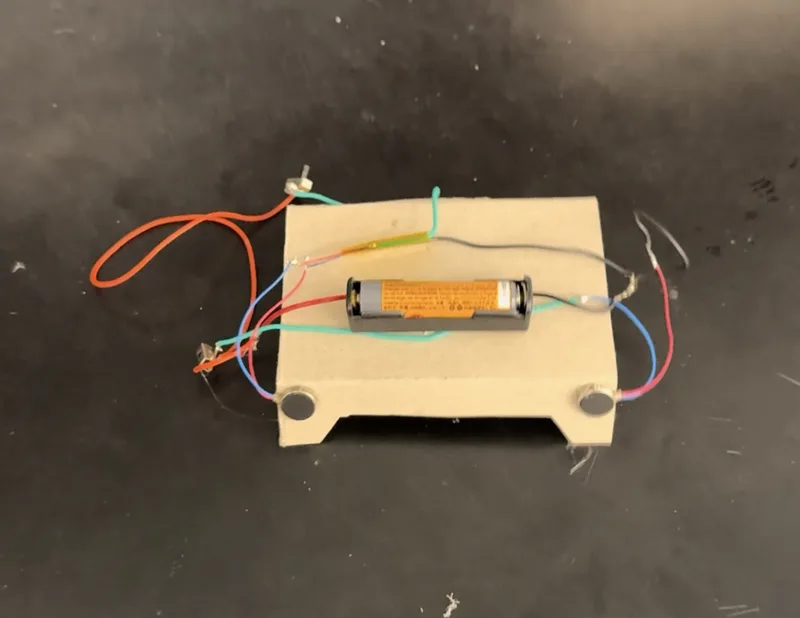
The initial prototype of the skitter bot was constructed using thin cardstock to mimic the flexibility of a PCB, allowing for early testing of movement dynamics. The primary goal was to create a working prototype, but the design faced challenges—particularly in achieving stable forward movement. Weight distribution proved to be a critical issue, causing instability, and precise alignment was necessary for proper function. Even with laser-cut templates, ensuring exact positioning was difficult, leading to inconsistencies in performance. These obstacles provided valuable insights that guided refinements in subsequent iterations.
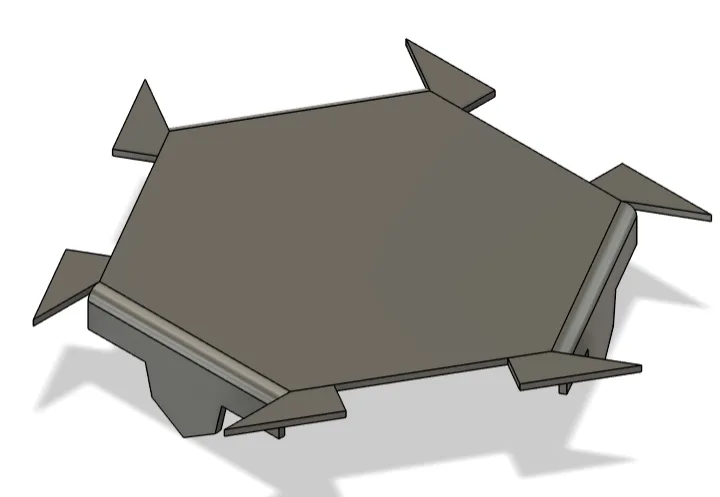
Building upon previous iterations, the next phase of development introduced a hexagonal design aimed at improving stability and movement efficiency. By positioning the motors at an angle similar to the KiloBot, we sought to optimize locomotion while maintaining a compact and lightweight structure. To further reduce overall weight, we transitioned to a coin cell battery, which helped minimize volatility and improve power distribution across the system.
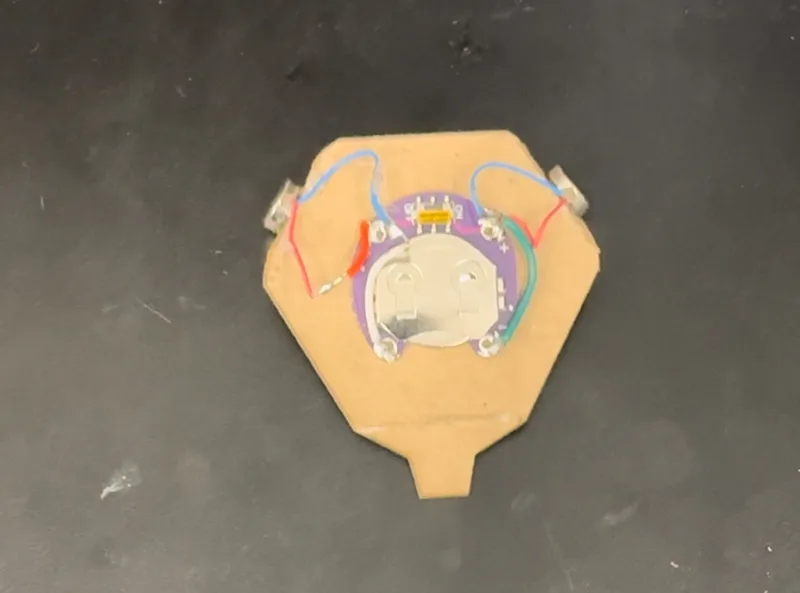
Despite these enhancements, the design still faced several challenges. Stability remained an issue, as weight distribution errors continued to affect movement consistency. The robot struggled to maintain balance, occasionally tipping or failing to move in a controlled manner. Additionally, securing the motors to the flexible PCB proved difficult, as improper attachment led to performance inconsistencies. Rigidity also posed a challenge—while flexibility was a key feature of the design, ensuring structural integrity without compromising movement required careful adjustments.
To try fixing the issue of rigidity and inaccurate folds, we attempted to create a press, which would also aid in manufacturing down the line. However, this failed to work due to incorrect pressure distribution, which led to uneven folds and weaknesses.
To improve locomotion, we switched to vibration motors with shafts, allowing wheels to be attached for enhanced movement. These motors could be soldered directly onto the PCB, simplifying the manufacturing process and improving reliability. However, despite the addition of wheels, the off-centered shafts prevented proper alignment with the center of rotation, leading to inefficiencies in movement. We soon realized that the wheels lacked sufficient torque for effective linear motion, making land-based travel impractical.
Interestingly, through testing, we discovered that the system could generate movement in water, which opened up new possibilities for an aquatic-based approach to locomotion. This realization prompted a shift in focus toward optimizing the design for water-based movement, including adjustments to buoyancy, propulsion mechanisms, and overall stability. By leveraging fluid dynamics, we aimed to overcome previous limitations while exploring new avenues for scalable and efficient robotic mobility. This transition marked a pivotal moment in the project, steering development toward innovative solutions that could have broader applications beyond land-based robotics.
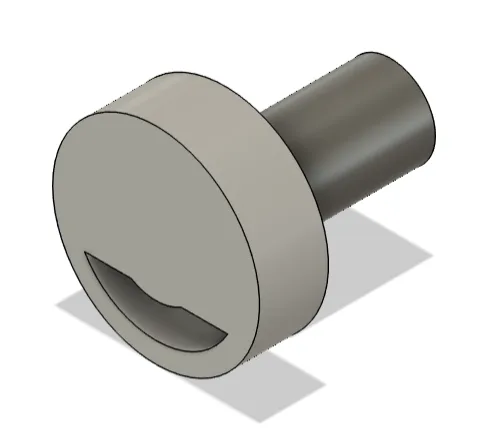
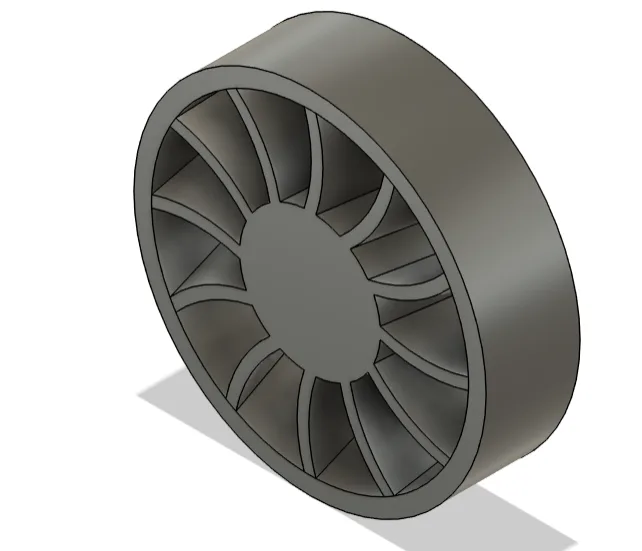
To enhance aquatic movement, we are developing a water wheel-based propulsion system designed to improve stability and control. The robot will remain afloat on the water’s surface, with its wheels partially submerged to generate motion. To maximize efficiency, the blades on the wheels will be carefully angled at a calculated pitch, increasing the force produced with each rotation. This optimized design will allow for smoother and more controlled movement.
For improved maneuverability, two motors will be strategically positioned on either side of the robot, enabling forward propulsion as well as precise left and right directional control. By leveraging fluid dynamics and mechanical efficiency, this approach aims to overcome previous stability challenges while paving the way for a reliable, adaptable water-based locomotion system. As testing continues, refinements in blade design, weight distribution, and power management will be explored to further enhance performance and scalability.
As we finalize the mechanical structure, we will begin integrating the electrical components, utilizing infrared communication to enable efficient and cost-effective signaling between robots. This approach allows for seamless data transfer without the need for complex or expensive wireless systems, making it ideal for large-scale deployment.
With the ability to be mass-produced at a lower cost than previously imagined, these robots will pave the way for swarm intelligence and collective behavior, offering scalable solutions for coordinated movement and task execution. Their compact design and affordability make swarm robotics more accessible, opening doors to applications in environmental monitoring, underwater exploration, and autonomous networked systems.
By shifting to a water-based locomotion model, we are also introducing a new frontier for collective robotics in aquatic environments. These robots have the potential to function as cooperative underwater units, capable of synchronized movement and dynamic adaptation to various conditions. This innovation marks an exciting step toward redefining collective robotics beyond traditional land-based applications, setting the stage for new discoveries and advancements in underwater swarm intelligence.